




I. Introduction▲
I-A. Qu'est-ce que D-Bus ?▲
D-Bus est un système de communication inter-processus (IPC : interprocess communication) offrant un moyen simple de dialoguer entre applications. D-Bus permet aux processus qui se sont enregistrés sur le bus d'exposer des services sur un ou plusieurs bus (système ou session) afin de communiquer entre eux. En outre, D-Bus est en mesure de démarrer des applications et daemons à la demande, lorsque leurs services exposés sur le bus sont demandés.
Démarré en 2002, D-Bus fait partie du projet freedesktop.org, et est maintenu principalement par RedHat. Il est distribué sous double licence GPL V2 / AFL.
Vous pouvez retrouver les spécifications détaillées du protocole sur le site de freedesktop.
Le but de cet article est avant tout de présenter le fonctionnement de D-Bus sans rentrer dans le détail de ses différentes implémentations. L'article ne requiert pas de prérequis particuliers si ce n'est quelques connaissances basique de fonctionnement d'un système Linux. A l'issue de cet article, l'idée est d'être en mesure de comprendre les particularités de D-Bus et d'avoir les bases pour mettre en place une architecture logicielle construite sur D-Bus.
Il existe différents "bindings" pour D-Bus. C'est à dire des bibliothèques développées dans d'autres langages plus haut niveau que celui de D-Bus, en l'occurrence le C. Ces bindings s'avèrent très utiles et d'adaptent aux besoins des développeurs selon les langages des logiciels à lier à D-Bus. Toutefois, les bindings D-Bus ne seront abordés que dans de futurs articles.
J'ai récemment mis en place une architecture logicielle basée sur D-Bus. Et j'ai vraiment manqué de documentation claire lors de la mise en place de D-Bus. Par conséquent j'ai souhaité partager mon expérience acquise sur le sujet, dans l'espoir d'aider un "futur moi" dans le besoin. D-Bus est partout, dans nos desktops, nos smartphones et appareils communicants sous Linux. Et nous allons voir en quoi D-Bus est vraiment utile pour le développement de systèmes multi processus.
I-B. Projets utilisant D-Bus▲
Les projets utilisant D-Bus sont relativement nombreux, on peut lister :
- Gnome
- MeeGo, anciennement Maemo / Moblin
- Android
- Skype
- Telepathy
- Evolution
- Pidgin
- Nautilus
- Connman
- network-manager
- HAL
- ...
Pour prendre un exemple concret, au sein d'Ubuntu, D-Bus permet, entre autres :
- à Nautilus de lancer un fichier multimedia via Rhythmbox au passage de la souris sur l'icone du fichier.
- à Pidgin d'afficher des popups de notification via Gnome à la réception de messages.
- à Evolution d'afficher des popups de notification via Gnome en cas de réception d'email.
- à Network-manager de gérer dans Gnome l'icone de gestion du réseau en haut à droite de l'écran
II. D-Bus : Les concepts▲
L'implémentation du protocole D-Bus offre différents outils :
- Une bibliothèque, libdbus, permettant aux applications de communiquer entre elles.
- Un exécutable dbus-daemon basé sur libdbus, dont le rôle est de créer le support de communication entre les processus. Le daemon va s'occuper de router et acheminer les messages vers un ou plusieurs processus connectées au bus.
- Des wrappers et bindings permettant de travailler avec certains langages ou framework particuliers. Il existe des bindings pour le C et la glib, le C++ et le framework QT, Python, etc. A cela s'ajoute une API low-level en C permettant de créer ses propres bindings.
D-Bus peut être vu comme une sorte de routeur auquel chacun des processus est connecté par une connexion bidirectionnelle.
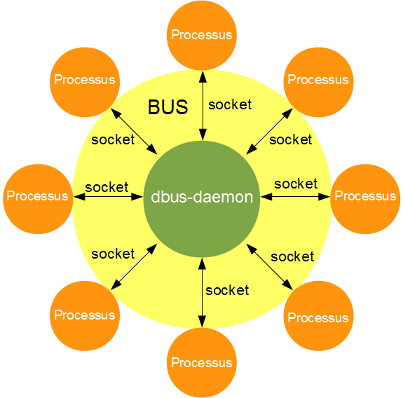
La connexion (sockets sur le schéma) peut prendre différentes formes :
- Unix Domain Sockets (IPC Sockets)
- launchd sous Mac OS X
- TCP/IP sockets
Il s'agit d'un protocole binaire, non textuel, qui s'affranchit donc des problèmes de sérialisation et de parsing de données formatées tel que le XML. On gagne donc en vitesse. (Hélas je n'ai pas eu l'occasion de tester et mesure cet aspect). Si vous êtes courageux, vous pouvez retrouver les spécifications de D-Bus sur le site de freedesktop.
D-Bus offre deux types de bus :
- Le bus session, il est utilisé pour la communication au sein d'une session utilisateur. Plus particulièrement au sein d'une session graphique de X. Il est créé à l'ouverture de session de l'utilisateur et perdure tant qu'elle est ouverte.
- Le bus système, comme son nom l'indique est dédié au transport d'information système bas niveau telles que les events kernel sous Linux, les notifications de connexion à un réseau, le (dé)branchement d'un périphérique USB, le statut de la batterie, etc. Des messages qui concernent donc tous les utilisateurs connectés au système. N'importe quel processus est en mesure de se connecter au bus système. Cependant, cette instance de bus possède une couche de sécurité autorisant ou refusant les messages qu'on lui demande de transmettre. A noter, que seul un seul bus système peut fonctionner à la fois. Le bus système est créé au démarrage du système dans une distribution de type Ubuntu.
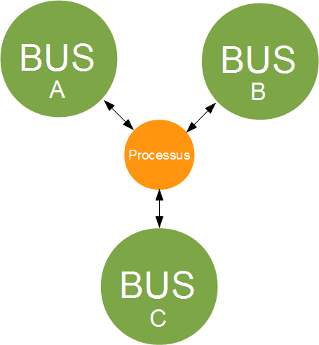
Rien ne nous empêche de connecter une application à plusieurs bus. Par exemple à plusieurs bus session et au bus système. On peut par exemple séparer plusieurs bus de session pour des questions de sécurité. Mais nous aborderons la notion de sécurité un peu plus loin.
Pour information, je déconseille fortement de tenter un /etc/init.d/dbus restart dans une session Ubuntu. Le résultat est juste catastrophique pour votre session. Vous n'avez plus qu'à redémarrer votre session ! :)
Il existe aujourd'hui de nombreux systèmes de bus. D-Bus se démarque par sa conception orientée communication entre applications d'une session de type "Desktop", mais aussi pour la communication entre le Desktop et le système d'exploitation. D-Bus peut très bien être utilisé pour des systèmes n'ayant pas forcément de partie graphique, ni d'aspect "Desktop". C'est à dire qu'il est parfaitement envisageable d'utiliser D-Bus en embarqué pour faire dialoguer ses applications entre elles.
Les mécanismes de D-Bus ne se résument pas qu'à une simple ouverture de socket entre le processus et le daemon. D-Bus permet d'identifier de façon unique les services qu'expose une application sur le bus. Rentrons dans les détails !
II-A. Messages▲
Il existe différents types de messages :
- les signaux
- les méthodes
- les messages d'erreur
Les signaux sont des notifications d'événements. Le signal est à sens unique et n'attend pas de retour. Son expéditeur ne précise pas le destinataire du message. Plusieurs processus peuvent s'abonner à ce signal. De plus, il peut contenir des paramètres.
Les méthodes permettent à des applications d'invoquer les méthodes d'objets distants. Les méthodes peuvent êtres invoquées avec des paramètres. Ces dernières peuvent être synchrones ou asynchrones et surtout en mesure de remonter de l'information à l'appelant en renvoyant un ou plusieurs paramètres (qui restent optionnels).
Les messages d'erreur offrent des exceptions dans le cas d'invocations de méthodes.
Du fait que D-Bus est un mécanisme de communication inter-processus, ce dernier supporte nativement plusieurs types pour les données échangés sur le bus (boolean, int32, string, ...). D-Bus gère également des containers pour ces types : tableau, structure, dictionnaire et variant. Pour une liste exhaustive, se référer aux spécifications de D-Bus. Toutefois l'utilisation du typage de données est intimement liée au "binding" choisi lors du développement de l'application. Ces points seront abordés plus en détail dans de futurs articles.
II-B. Services▲
Un processus enregistre un service auprès du daemon D-Bus. Tous les clients souhaitant utiliser ce service vont pour cella créer un proxy (voir après). Lorsque des clients vont appeler des méthodes de l'objet du proxy, ce dernier va convertir ces méthodes en appels D-Bus qui sont reçus et exécutés par le processus qui a enregistré le service.
De plus, D-Bus fournit un mécanisme capable de démarrer automatiquement des applications à partir d'un simple appel. Une application peut exposer des services sur un bus. Si un des services est demandé par un autre processus, alors D-Bus est en mesure de démarrer l'application pour avoir accès au service en question.
Prenons l'exemple du service org.gnome.Rhythmbox sous Linux (lecteur multimédia d'Ubuntu). Il est possible de lui demander de lire une musique, voir de lire la suivante dans une liste de lecture, la stopper, etc. Tout cela par D-Bus. Si un appel D-Bus demande de lire une musique, et que le service Rythmbox n'est pas enregistré sur le Bus, alors, il va être automatiquement lancé et le message en question sera transmis à Rythmbox une fois que ce dernier sera opérationnel. Toutes ces étapes sont transparentes pour le processus à l'initiative de l'appel.
Nous pourrons voir un peu plus loin un exemple d'utilisation de Rythmbox par Dbus en ligne de commande.
Généralement, la plupart des applications utilisant D-Bus sont définies commes services. Sous Linux, la liste des services est située dans le dossier /usr/share/dbus-1/services. On y retrouve notamment à l'intérieur le nom du service et le binaire à démarrer à l'appel du service.
II-C. Objets▲
Chaque message D-Bus possède une source et une destination. Ces adresses sont définies par des "object paths". Chaque processus connecté à un bus peut avoir enregistré un ou plusieurs objets. Les messages sont alors envoyés entre objets, mais pas directement par les applications.
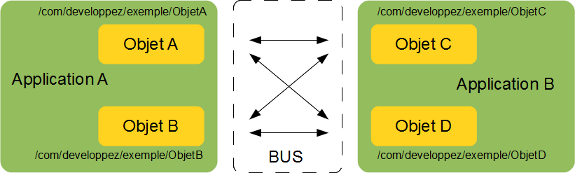
Le PATH d'un objet est similaire à celui d'un filesystem UNIX, par exemple un objet pourrait être nommé /com/developpez/exemple/objetDBus. Il s'agit là d'une convention de nommage, nous sommes libres de créer des PATH de notre choix.
D-Bus permet ainsi aux applications d'exporter leurs objets et leurs fonctionnalités en tant que méthodes, que les applications peuvent utiliser pour communiquer entre elles. Elles utilisent pour cela les messages D-Bus.
Si l'on fait une comparaison avec un programme écrit en C++ qui implémente un service réseau, alors le nom du bus est l'hostname de la machine exécutant le programme. L'object path peut alors être vu comme un pointeur d'objet C++
II-D. Interfaces▲
D-Bus utilise également le principe d'interfaces, ce qui autorise l'utilisation d'un même nom de méthode plusieurs fois au sein d'un objet pour différents contextes. C'est une sorte de “namespace” pour les noms de méthodes, un groupe de méthodes et de signaux.
Si l'on reprend notre analogie au C++, l'interface peut être vue comme une classe C++
On peut prendre l'exemple de l'interface org.freedesktop.Introspectable qui permet aux instances d'objets de récupérer la description d'un objet (interfaces, signaux, méthodes et mêmes propriétés) et donc de faire ce que l'on appelle de l'introspection sur le bus. Très pratique ! (je ne vais pas plus loin, c'est juste un exemple. Vous avez plus d'informations à ce sujet dans les spécifications.)
II-E. Proxies▲
Les proxies sont des éléments haut niveau dans D-Bus, utilisés par les bindings pour simplifier l'utilisation du protocole. Ils permettent d'accéder aux objets à distance tout en travaillant au sein de notre programme. L'utilisation sera plus ou moins transparente pour le développeurs suivant les bindings. Le binding Glib n'est pas le plus simple hélas, mais permet de comprendre eu peu plus en détail le fonctionnement de D-Bus. Le binding Java, par exemple ne fait pas de différence entre les objets et les proxies. On a alors l'impression de travailler directement avec un objet. Nous pourrons aborder cette petite différence dans les prochains tutoriaux relatifs aux différents bindings.
Il est intéressant de noter qu'un proxy (pour certains bindings comme la Glib) permet de travailler avec un objet distant même en cas de "déconnexion" de celui-ci. Les proxies se comportant de cette façon, gèrent une sorte de "failover". La reconnexion à l'objet distant est alors transparente, ce qui est relativement pratique. Prenons l'exemple du fichier org.gnome.Rhythmbox.service :
[D-BUS Service]
Name=org.gnome.Rhythmbox
Exec=/usr/bin/rhythmboxIII. Fonctionnement et utilisation de D-Bus▲
Avec une installation clé en main classique, D-Bus se créé un script de démarrage dans /etc/init.d qui permet de démarrer et stopper le daemon. Tout est démarré de façon automatique et presque transparente pour l'utilisateur. Nous allons toutefois décortiquer les étapes de lancement de D-Bus.
Avant toute chose D-Bus ne nécessite pas beaucoup de dépendances, on peut librement choisir la dépendance à libexpat ou libxml2. Le package sous Ubuntu utilise expat par défaut, mais la recompilation nécessaire pour passer à libxml2 n'est pas bien méchante.
D-Bus arrive avec un lot d'exécutables :
- dbus-launch : permet de démarrer un bus session depuis un script shell
- dbus-cleanup-sockets : fait le ménage dans les sockets ouverts par des bus et qui ne sont plus utilisés.
- dbus-send : permet d'envoyer un message sur le bus depuis un script shell
- dbus-daemon : Le plus important, le daemon D-Bus
- dbus-monitor : Permet d'observer ce qui transite sur un ou plusieurs bus
- dbus-uuidgen : génère des uuids pour les sessions de D-Bus
et de fichiers de configuration par défaut (/etc/dbus-1/ sous Linux)
III-A. Lancement de D-Bus▲
Pour lancer D-Bus lorsqu'il n'est pas déjà lancé (attention, les distributions récentes le lancent au démarrage), la première chose à faire est de lancer :
dbus-uuidgen --ensurequi va aller vérifier l'existence du fichier /var/lib/dbus/machine-id. S'il n'existe pas il va générer un nouvel uuid (un identifiant unique). Le comportement est similaire à la commande uuidgen. Attention toutefois, l'uuid généré n'est pas un uuid standard.
L'étape suivante est le démarrage du bus system :
/usr/bin/dbus-daemon --systemIl existe tout un lot d'options avancées à dbus-daemon que vous pouvez retrouver sur le man de celui-ci. A noter cependant, qu'écrire dbus-daemon --system revient à écrire l'option "--config-file=/etc/dbus-1/system.conf", même chose pour --session avec "/etc/dbus-1/session.conf"
Cela me permet alors d'introduire la notion de configuration de D-Bus. En effet, ce dernier est paramétrable grâce aux fichiers de configuration suivants
- /etc/dbus-1/system.conf
- /etc/dbus-1/session.conf
Ils permettent de préciser des limites de ressources, paramètres de sécurité, tailles de messages, timeout, ... Je vous invite à consulter le man de dbus-daemon pour en savoir plus.
Le lancement d'une session est "légèrement" plus compliqué. Comme il peut y avoir plusieurs bus session, il faut être en mesure de distinguer sur quel bus nous allons discuter. Nous utilisons pour cela la commande dbus-launch. Celle-ci va alors lancer une instance de bus de session en définissant les variables d'environnement nécessaires pour que les futurs programmes soient en mesure de trouver le bus.
Il suffit alors de lancer la commande suivante
dbus-launch --sh-syntaxqui nous retourne ces quelques lignes sur la sortie standard
DBUS_SESSION_BUS_ADDRESS='unix:abstract=/tmp/dbus-pV37oOMDlR,guid=90f13303a628db51a40b63454d14b6e7';
export DBUS_SESSION_BUS_ADDRESS;
DBUS_SESSION_BUS_PID=10440;
DBUS_SESSION_BUS_WINDOWID=62914561;dbus-launch fait tout simplement appel à dbus-daemon --session et se charge de définir les variables de session que nous avons là. DBUS_SESSION_BUS_ADDRESS nous permet alors d'identifier le bus que nous venons de créer (on y retrouve les information sur le socket ouvert ainsi que l'uuid du bus). Sans la variable DBUS_SESSION_BUS_ADDRESS de définie dans votre environnement, vous aurez le droit à une erreur.
J'utilise ici l'option --sh-syntax qui permet d'afficher les informations du bus sur la sortie standard à destination d'un shell de type sh. Il existe d'autres options de formatage : --csh-syntax, --binary-syntax, ou --auto-syntax. Car par défaut, dbus-launch écrit de simples clés/valeurs sur la sortie standard et ne les exporte pas.
Je vous invite à regarder les man de chacune de ces commande si vous souhaitez avoir accès aux options avancées. A noter que la commande dbus-cleanup-sockets permet de faire du ménage dans les sockets ouverts par les bus et qui n'auraient pas été fermés correctement (en cas de fermeture intempestive par exemple.)
Sur un système clé en main de type Ubuntu, tout est lancé automatiquement et le bus est intimement lié à la session de Gnome. Donc avec un Ubuntu fraichement démarré, nous avons les bus system et session qui tournent. Par conséquent, nous n'avons pas à nous soucier des variables d'environnement déjà définies au démarrage de la session.
III-B. Utilisation de D-Bus par l'exemple▲
Nous pouvons à présent nous intéresser à d'autres commandes déjà plus concrètes.
- dbus-monitor, comme son nom l'indique, permet à la façon “wireshark” d'observer ce qui transite sur le bus.
- dbus-monitor --system permet d'observer le bus system
- dbus-monitor --session permet d'observer le bus session
Sans paramètre donné, dbus-monitor observera le bus session.
Vous pouvez alors voir qu'au sein d'une session Ubuntu énormément d'information transite sur le bus. En observant le bus system, on peut remarquer que des informations transitent lorsque l'on branche ou débranche une souris par exemple.
Il est possible filtrer les messages en spécifiant le type, l'émetteur, l'interface, ... Par exemple observer les signaux envoyés par l'objet org.gnome.TypingMonitor:
dbus-monitor type=signal sender=org.gnome.TypingMonitor interface=org.gnome.TypingMonitorOu pour espionner les signaux de Pidgins, nous pouvons utiliser la syntaxe suivante :
dbus-monitor type=signal interface=im.pidgin.purple.PurpleInterfaceLes outils graphiques :
permettent également d'observer ce qui transite sur D-Bus et de communiquer avec les processus. Mais d'autres applications existent, comme dbus-daemon-proxy développée par Alban Créquy qui redirige tout le trafic D-Bus par TCP. Outil initialement prévu pour teléphone nokia N900, pratique pour débugger à distance.
Pour terminer, le plus intéressant, l'outil dbus-send. Cette commande permet tout simplement d'envoyer un message depuis un script shell, et va me permettre d'illustrer concrètement mes précédentes explications.
dbus-send attend au minimum les arguments suivants :
- le nom du destinataire
- l'object path
- le nom du message
- et dans certains cas le type de message est requis
Prenons quelques exemples sous Ubuntu
dbus-send --dest='org.gnome.Rhythmbox' /org/gnome/Rhythmbox/Player org.gnome.Rhythmbox.Player.nextenvoie le message next au logiciel Rythmbox ce qui fait passer à la musique suivante
dbus-send --dest=org.freedesktop.PowerManagement /org/freedesktop/PowerManagement/Backlight org.freedesktop.PowerManagement.Backlight.SetBrightness uint32:25réduit à 25% la luminosité de votre écran
dbus-send --print-reply --dest=org.freedesktop.PowerManagement /org/freedesktop/PowerManagement/Backlight org.freedesktop.PowerManagement.Backlight.GetBrightnessretourne la valeur de la luminosité de votre écran
dbus-send --type=method_call --dest=org.gnome.ScreenSaver /org/gnome/ScreenSaver org.gnome.ScreenSaver.Lockverrouille votre écran
dbus-send --type=method_call --dest=org.freedesktop.PowerManagement /org/freedesktop/PowerManagement org.freedesktop.PowerManagement.Shutdownéteint votre ordinateur
dbus-send --system --print-reply --dest=org.freedesktop.Hal /org/freedesktop/Hal/devices/computer org.freedesktop.Hal.Device.GetAllPropertiesretourne toutes les propriétés de HAL (hardware abstraction layer), c'est à dire de votre matériel.
Etc.
IV. Gestion de la sécurité avec D-Bus▲
D-Bus a également été développé dans un soucis de sécurité lors de l'échanges de messages. Les politiques de sécurité de D-Bus permettent de spécifier qui a le droit de parler à qui, ce qui est réellement pratique.
La politique de sécurité de D-Bus se précise dans les dossiers :
- le dossier /etc/dbus-1/system.d pour le bus système
- le dossier /etc/dbus-1/session.d pour le bus session
Elle se présente sous la force de fichiers XML à placer directement dans les dossier cités précédemment. Peu importe le nom des fichiers, seul le contenu va jouer ici.
Voici un exemple très simple qui autorise l'utilisateur root à
- posséder l'objet com.developpez.exemple.ObjetA
- envoyer des messages à l'object com.developpez.exemple.ObjetA
- appeler l'interface com.developpez.exemple.ObjectInterface
<!DOCTYPE busconfig PUBLIC
"-//freedesktop//DTD D-BUS Bus Configuration 1.0//EN"
"http://www.freedesktop.org/standards/dbus/1.0/busconfig.dtd">
<busconfig>
<policy user="root">
<allow own="com.developpez.exemple.ObjetA"/>
<allow send_destination="com.developpez.exemple.ObjetA"/>
<allow send_interface="com.developpez.exemple.ObjectInterface"/>
</policy>
</busconfig>Il est alors possible de restreindre les accès suivant les utilisateurs, mais surtout de dire qui a droit de parler avec qui et sur quelles interfaces. Pour des explications détaillées sur la configuration des politiques de sécurité, se référer au man de dbus-daemon.
Dans certains cas, la sécurité de D-Bus n'est pas suffisante, et peut être couplée à SELinux. SELinux apporte la possibilité de restreindre l'accès d'applications spéficiques à des services donnés. Je n'ai jamais eu l'occasion d'aller jusque là, mais sa configuration se fait grâce à la balise <selinux>. Pour plus d'information, se référer également au man ou à la documentation de Redhat.
V. Les avantages et inconvénients de D-Bus▲
V-A. Les avantages▲
- D-Bus est léger
- D-Bus est un simple bus partagé par tout le système. Ce qui offre la possibilité de faire communiquer énormément d'applications entre elles, qu'elles soient au niveau de la session X ou du noyau.
- D-Bus permet une communication synchrone/asynchrone.
- Dans certains cas (comme Telepathy), D-Bus peut-être utile pour faire cohabiter des programmes dont les licences seraient contaminantes si elles ne passaient pas par un bus intermédiaire.
- D-Bus est multiplateforme et présent sur les 3 OS principaux (Windows, Mac, Linux)
- D-Bus peut être détourné de son utilisation "desktop" classique et adaptée aux besoins des systèmes embarqués.
- D-Bus permet de travailler de façon modulaire et développer des applications découpées en briques communicantes. Une brique peut planter sans impacter les autres et se reconnecter au bus d'elle même sans que tout le système s'écroule.
V-B. Les inconvénients▲
- Suivant le binding choisi D-Bus peut-être contaminant du fait de sa license. Prenons l'exemple du binding glib, sous license GPL V2. Il peut être "embêtant" de lier un projet dont on ne souhaite pas publier le code métier sous license open source. Ce genre de désagrément sera abordé dans un futur article dédié au binding glib. Cependant il faut néanmoins bien prendre en compte la question des licenses lorsque l'on part sur des projets industriels avec D-Bus. Les très mauvaises surprises sont très vite arrivées.
- Selon le binding, l'apport de bibliothèques partagées assez lourdes peut-être assez problématique selon les projets. Pour des cibles de type embarqué par exemple, embarquer le binding glib et ses libdbus.so* n'est pas un choix à prendre à la légère et peut être même rédhibitoire selon les contraintes de ressources et de place.
- Je n'en trouve pas d'autres ! :)
VI. Les différents bindings D-Bus▲
Il existe différents bindings D-Bus pour utiliser le protocole avec différents langages :
L'API C "low-level" de D-Bus existe pour créer de nouveaux bindings. La librairie permet de travailler de façon très bas niveau sur le protocole. Mais comme la documentation le précise "If you use this low-level API directly, you're signing up for some pain." "Si vous utilisez directement l'API bas niveau, vous vous engagez à souffrir" :)
Mais pour travailler avec des langages un peu plus haut niveau, des bindings existent pour les langages suivants. En C avec Glib et Vala, en Python avec dbus-python , en C++ avec dbus-cxx ou le module QtDBus de QT, mais aussi en Java, C#, enlightenment, Perl, PHP, Pascal, Ruby, Haskell, OCaml, Objective-C, ...
VII. Conclusion▲
Aujourd'hui, une très grande part des applications GNOME et KDE utilise D-Bus comme support de communication. Les possibilités d'interfaçage sur de nombreux langages offre de de belles possibilités de développement multiprocessus. Si j'arrive à trouver le temps, je rédigerai un prochain article sur des bindings D-Bus en particulier, histoire d'illustrer encore plus mes propos. En attendant, si vous avez des questions, ou remarques, n'hésitez pas !
VIII. Remerciements▲
Je remercie beaucoup bizulk pour sa relecture méticuleuse et ses remarques constructives qui m'ont été très utiles.
IX. Bibliographie▲
- http://library.gnome.org/devel/platform-overview/stable/dbus.html.en
- http://www.ibm.com/developerworks/linux/library/l-dbus.html
- http://freedesktop.org/wiki/IntroductionToDBus
- http://dbus.freedesktop.org/doc/dbus-tutorial.html
- http://dbus.freedesktop.org/doc/dbus-specification.html
- http://www.redhat.com/magazine/003jan05/features/dbus
- http://www.unixgarden.com/index.php/programmation/decouvertes-et-experimentation-avec-d-bus
- http://www.linuxjournal.com/article/7744
- http://doc.ubuntu-fr.org/dbus
- http://www.linuxforu.com/teach-me/d-bus-the-smart-simple-powerful-ipc
- Sans compter la mailing-list de D-Bus :)